Dobb·E
About Dobb·E
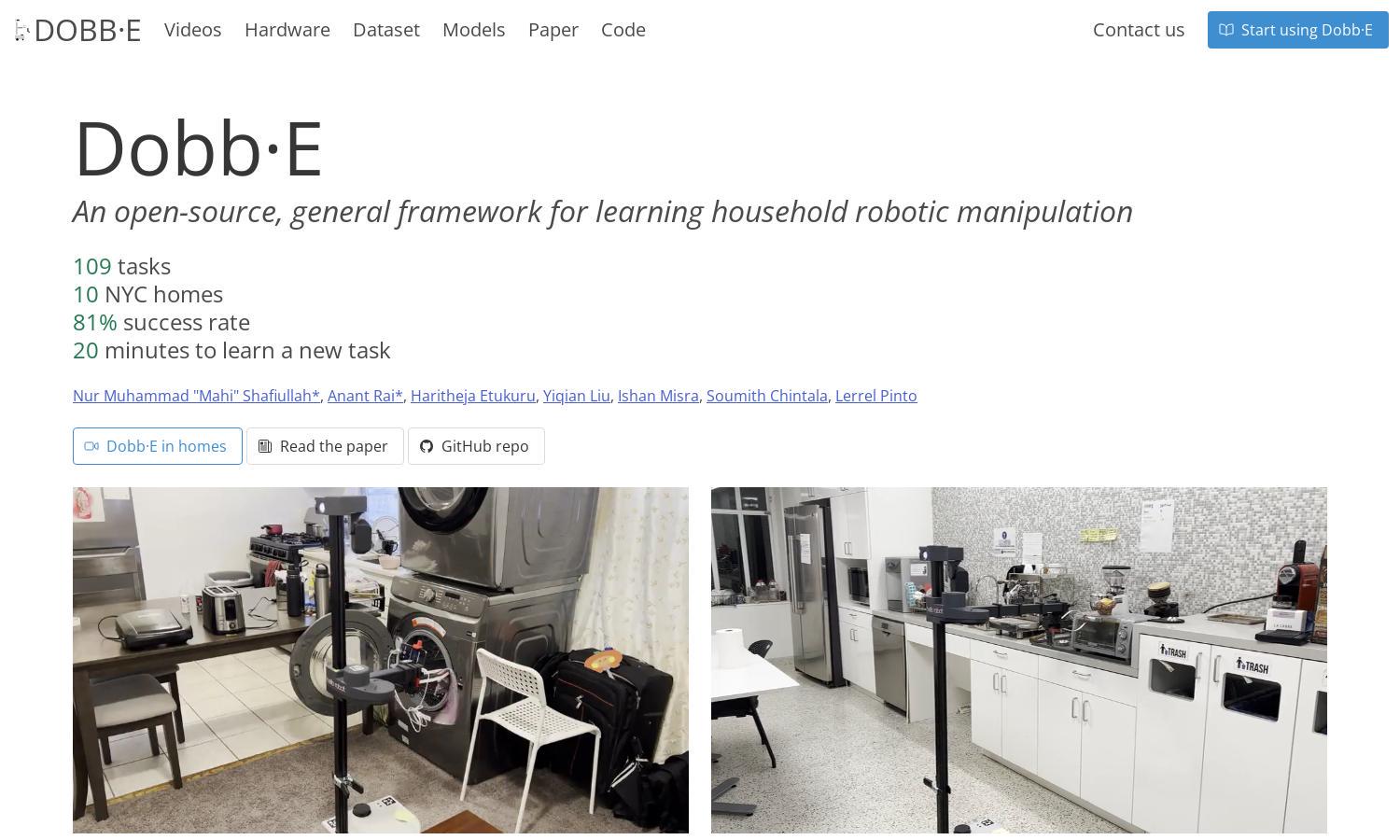
Dobb·E is a revolutionary open-source platform designed for teaching robots to perform household tasks through imitation learning. Users leverage a simple tool called the Stick to collect data and train robots quickly, achieving an 81% success rate in multiple home environments, enhancing domestic automation.
Dobb·E offers a free and open-source platform for anyone interested in robotic learning. With its robust features, users can quickly train robots on various tasks. Upgrading access to additional models and dataset features enhances learning efficiency, appealing to both developers and researchers in robotics.
Dobb·E’s user interface is designed for simplicity and efficiency, making robotic task learning accessible. With a clean layout and intuitive navigation, users can quickly find necessary tools and animations that demonstrate robotic tasks, ensuring a seamless and engaging user experience each time they interact with the platform.
How Dobb·E works
Users start by accessing Dobb·E's web application, where they can learn about the features and tools available for robotic learning. The process begins with using the Stick to capture demonstrations within a home setting. After data collection, users can upload their videos, and the intuitive interface guides them through training a model. Dobb·E's efficient framework allows users to adapt learned behaviors in new environments, all within a fraction of the time it traditionally takes for robotic training.
Key Features for Dobb·E
Imitation Learning in 20 Minutes
Dobb·E features an innovative imitation learning mechanism that enables robots to acquire new household tasks within just 20 minutes. This rapid learning capability sets Dobb·E apart, making it an effective tool for integrating robotics into everyday life seamlessly and efficiently.
Data Collection with the Stick
The Stick is a unique demonstration tool employed by Dobb·E for easy data collection. Constructed from affordable materials, it enables users to effectively capture task demonstrations, vastly improving the training process for robots. This feature significantly simplifies the way users can interact with and teach robots.
Home Pretrained Representations (HPR)
Dobb·E utilizes Home Pretrained Representations (HPR), a specialized model trained on extensive datasets. This model allows robots to quickly adapt to new tasks in unfamiliar environments, enhancing their learning experience. HPR significantly improves task performance, making Dobb·E a powerful solution for home automation.
You may also like: